Research
Indoor LiDAR Localization through Instance Learning
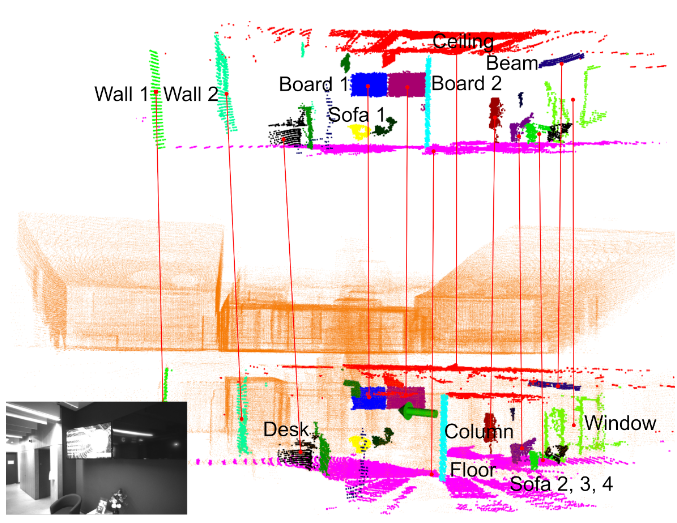
One-shot Global Lidar Localisation in Indoor Environments through Instance Learning.
3D Lidar Reconstruction with Probabilistic Depth Completion
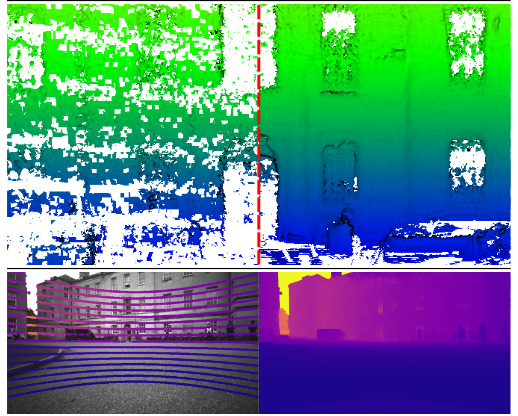
Learning-based uncertainty-aware depth completion.
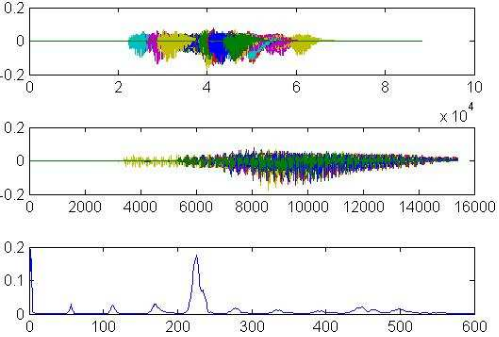
Online Forest Mapping and Inventory Generation using Handheld LiDAR
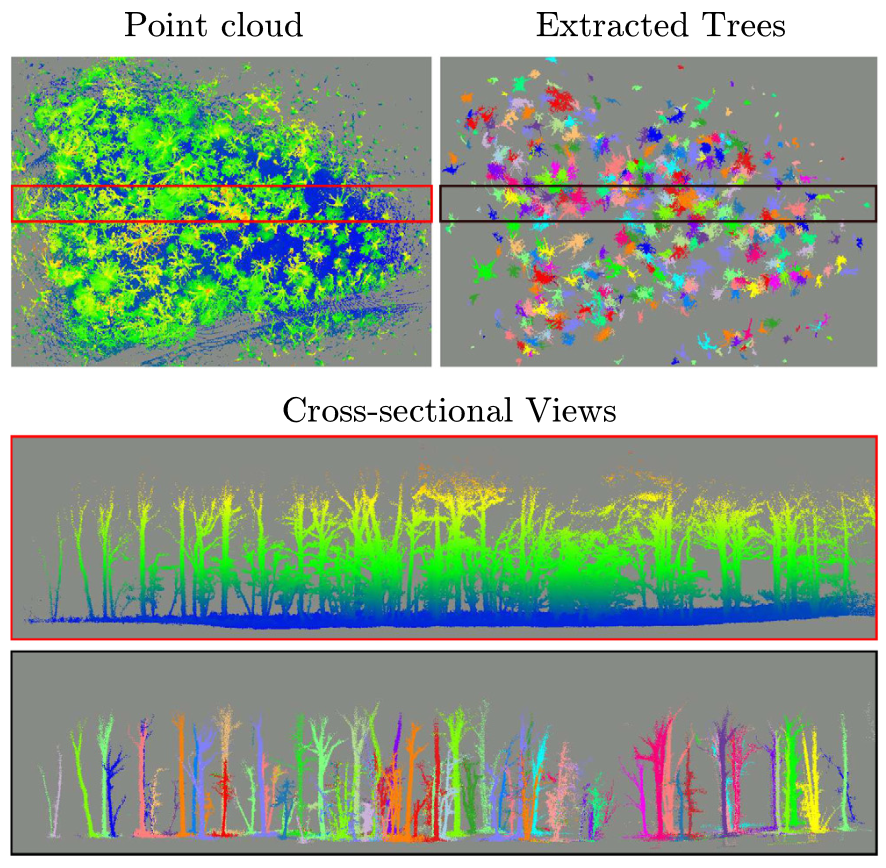
Realtime mapping of forests and online extraction of metrics from handheld LiDAR.

Learning to See with Sparse Light Field Video Cameras

Generalized unsupervised odometry and depth estimation on sparse 4D light fields.
Semantics for Forestry
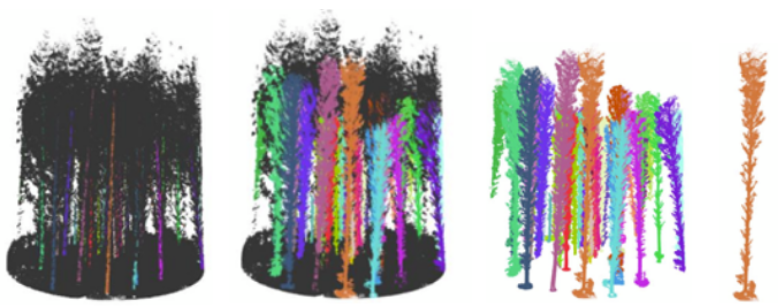
A framework for extracting tree structures from forest scale 3D point clouds.
Doctoral Thesis at ETH Zurich and Disney Research, Zurich, Switzerland
Learning Based Tree Point Cloud Segmentation
A learning based approach for segmenting a 3D point cloud of a tree into wood and leaves.
Semantic Segmentation of Tree Structure using CNNs
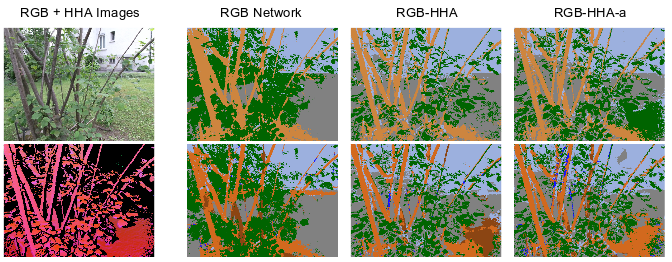
A deep learning based framework for semantic segmentation of RGBD images of trees into their components.
Segmentation of Tree Structure from 3D point clouds
A data-driven approach for segmenting a 3D point cloud of a tree into its components, using curvature features.
Underwater 3D capture using Commercial Depth Cameras
An underwater 3D capture system and a method for calibrating depth cameras for underwater use.
Masters Thesis at ETH Zurich and Disney Research, Zurich, Switzerland
Human Acquisition and Re-acquisition by Clothing Characterization
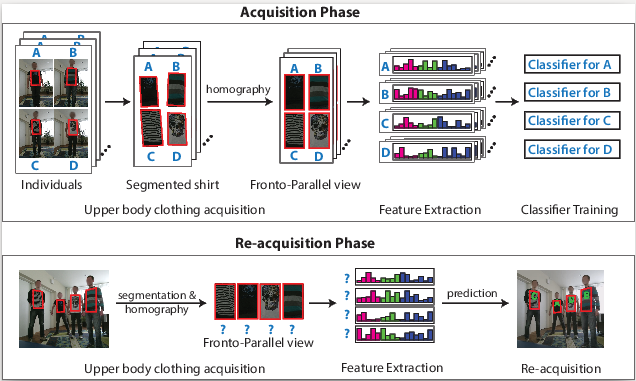
A system for identifying previously observed people using their clothing.
Masters Project at ETH Zurich, Switzerland
Research Internship at TCS Innovation Labs, Noida, India
Gesture based control for a service robot

A framework for controlling a service robot using human gestures
Research Internship at CNBI, EPFL, Switzerland
Benchmarking Classification Techniques for Human Activity Recognition
A benchmark of machine learning techniques for classifying human activity.