Self-Assembly of the Distributed Flight Array
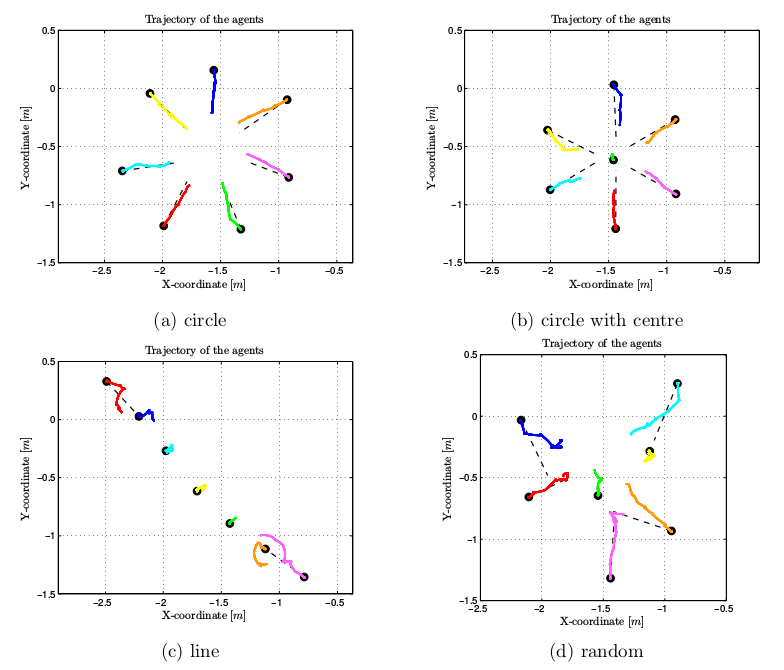
This was a semester project at the Institute for Dynamic Systems and Control (IDSC), ETH Zurich, under the supervision of Prof. Raffaello D’Andrea, Dr. Maximilian Kriegleder and Dr. Raymond Oung. In this project I developed a rendezvous algorithm for the robots of the Distributed Flight Array to cluster together. The challenge here was that the robots had limited sensing capabilities and could only sense the bearing towards other robots but not their positions. We showed that the algorithm converges under physical constraints.
This work was published at ICRA 2015.