Puggu
A game for PyWeek 29 
A game for PyWeek 29
A game for ludumDare 46
A game for pyweek 31
Robot bar in Sydney for the launch of Heineken Zer0.0.
Credit: Heineken
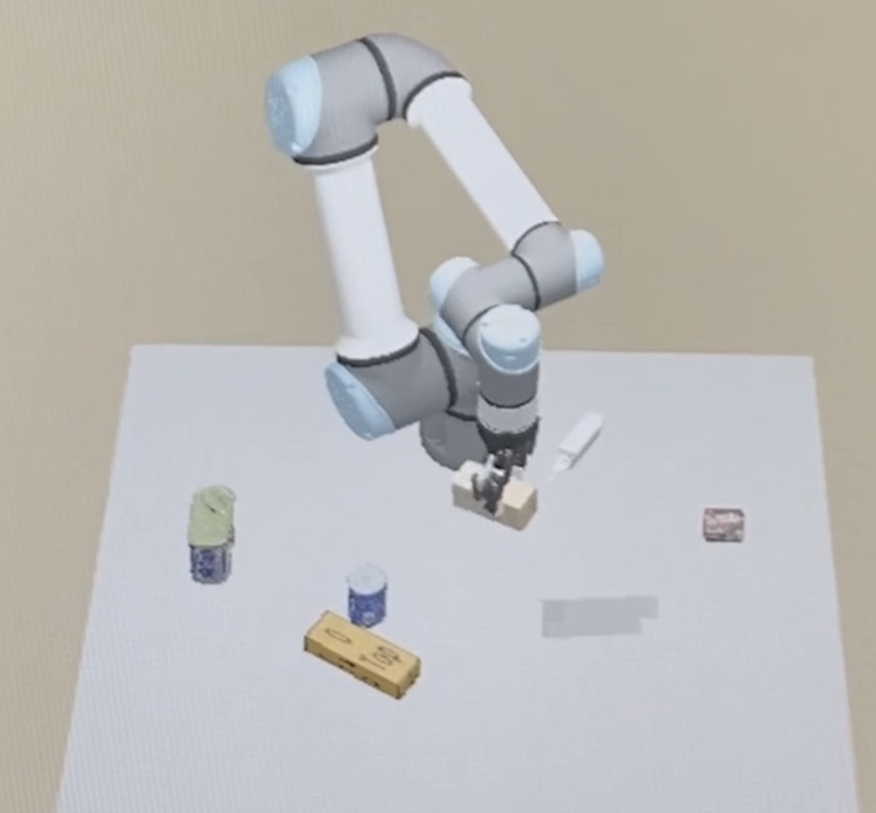
Open Cloud Robot Table Organization Challenge
Published in IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2011
Published in IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2011
Published in Advances In Robotics, 2013
Published in Pattern Recognition Letters, 2013
Published in IEEE International Conference on Robotics and Automation (ICRA), 2015
Published in IEEE Winter Conference on Applications of Computer Vision (WACV), 2016
Published in IEEE Robotics and Automation Letters (RAL), 2018
Published in IEEE International Conference on Robotics and Automation (ICRA), 2019
Published in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
Published in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
Published in Robotics and Autonomous Systems, 2022
Published in Robotics and Autonomous Systems, 2022
Published in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Published in Robotics: Science and Systems (RSS) (to appear), 2023
Voice based control for a smart wheelchair.
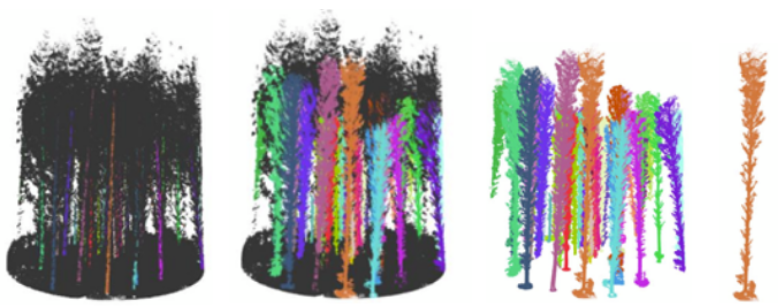
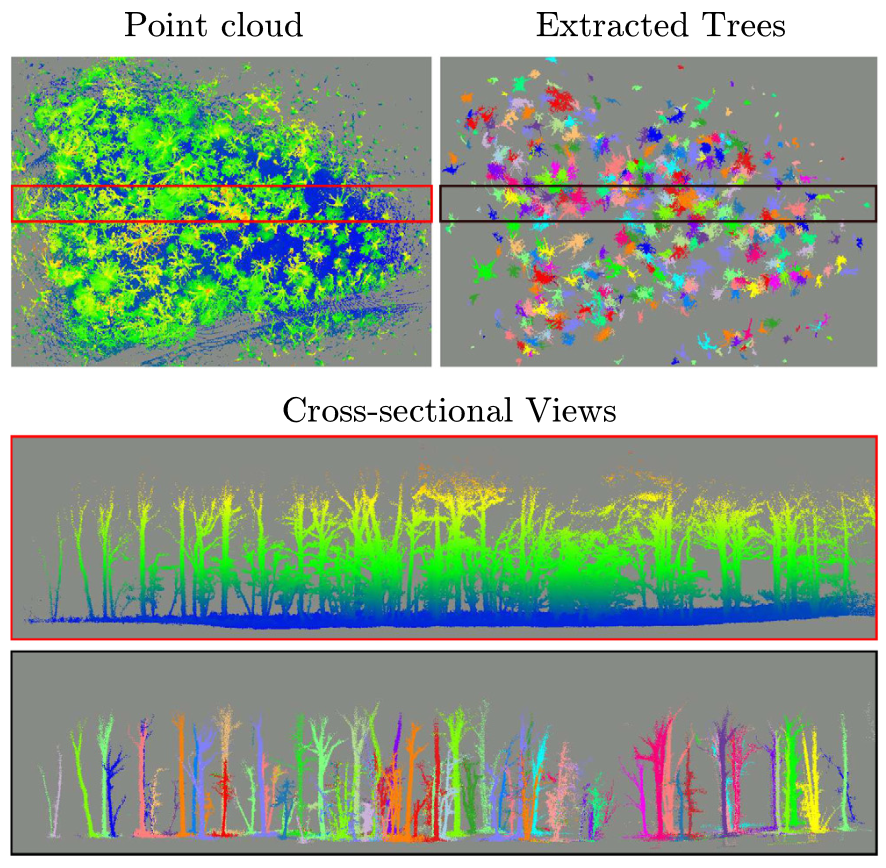
A framework for extracting tree structures from forest scale 3D point clouds.
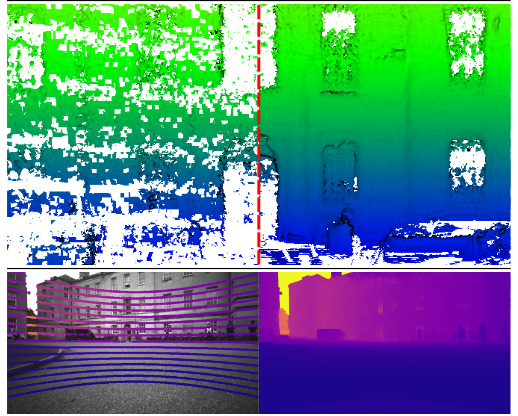
Generalized unsupervised odometry and depth estimation on sparse 4D light fields.

Strategies for large scale elastic and semantic LiDAR reconstruction.

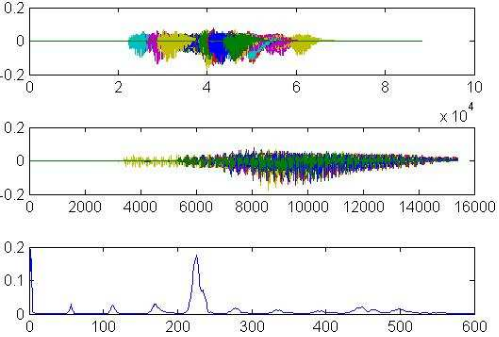
Realtime mapping of forests and online extraction of metrics from handheld LiDAR.
Learning-based uncertainty-aware depth completion.
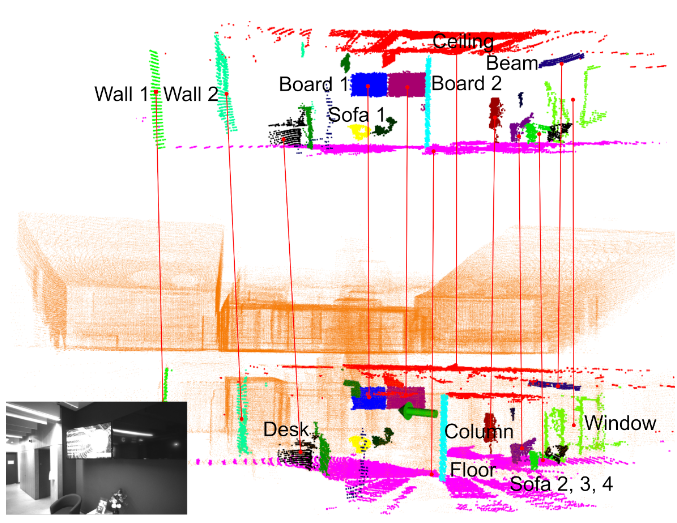
One-shot Global Lidar Localisation in Indoor Environments through Instance Learning.
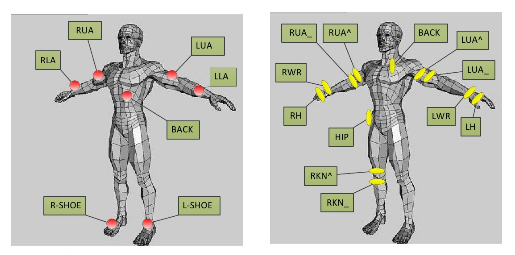
A benchmark of machine learning techniques for classifying human activity.
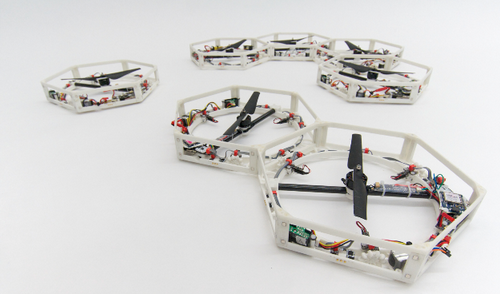
A rendezvous algorithm for a multi robot system.
A framework for controlling a service robot using human gestures.

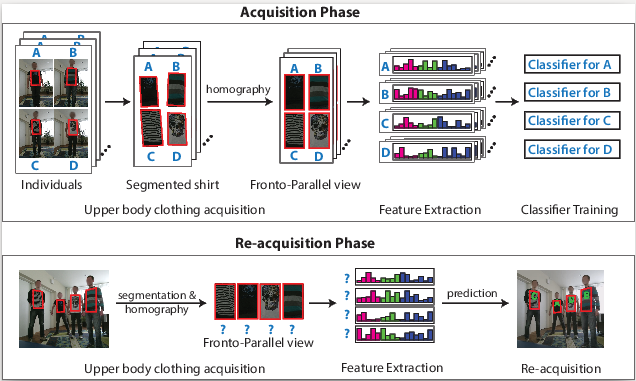
A system for identifying previously observed people using their clothing.
An underwater 3D capture system and a method for calibrating depth cameras for underwater use.
A data-driven approach for segmenting a point cloud of a tree into its components, using curvature features.
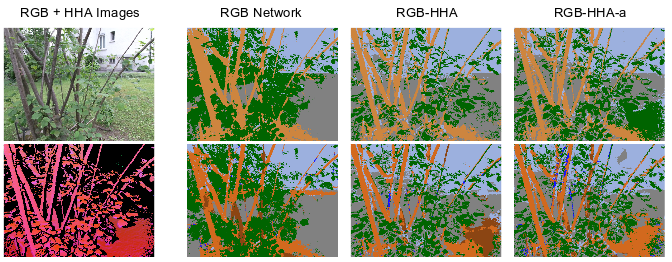
A deep learning based framework for semantic segmentation of trees into their components.
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Ungergraduate course, The University of Sydney, 2019
Ungergraduate and Graduate course, The University of Sydney, 2020
PhD Course, The University of Sydney, 2020
Ungergraduate course, The University of Sydney, 2020
Ungergraduate and Graduate course, The University of Sydney, 2021
PhD course, The University of Sydney, 2021
PhD course, The University of Sydney, 2022
Undergraduate course, Oxford Global Prospects Program, 2022
Undergraduate course, Oxford International Study Abroad Program, 2023